| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
实验一 X62W万能升降台铣床的电气控制实验
一. 实验原理 X62W万能升降台铣床电气控制原理图如图1-1。 要求:读懂原理图,特别注意下列元件的作用。 1.主轴换向转换开关SA5的作用; 2.上铣刀开关SA2-1,SA2-2的作用; 3.主轴接触器KM1辅助常开触头(7-17)的作用; 4.矩形工作台工作时,SA1-1和SA1-3接通,SA1-2断开; 5.工作台纵向向右进给时ST1-1接通,ST2-2断开;向左进给时,ST2-1接通,ST1-2断开; 6.工作台横向及升降由十字手柄控制。向前和向下进给接通同一个行程开关ST3-1,分断ST4-2。向后和向上进给接通同一个行程开关ST4-1,分断ST3-2。十字手柄扳向前、后机械上接通横向进给离合器,十字手柄扳向上、下机械上接通垂直进给离合器; 7.六个进给方向由一个电动机M2控制,由KM2和KM3控制其正、反转。 二. 实验设备 X62W万能升降台铣床的电气控制模拟装置。 本装置通过操纵相关按纽,手柄开关,利用电动机的转向模拟主轴起动与制动、矩形工作台六个进给方向的运动、圆形工作台的运动等。 本装置的电气元件基本上是按照原理图的位置布置的,而实际铣床的电器元件的布置是根据功能和操作要求而布置的,二者在元件分布上有很大的差别。 三. 实验方法 1.根据原理图熟悉实验装置上各电器元件的名称及功能; 2.主轴运转实验:合上Q1选择SA5为正转 (1).转动SA2,观察并记录实验装置面板上YC1的变化,并解释这一变化; (2).转动SA2,按动SB1,观察并记录主轴电动机M1及KM1的动作情况; (3).选择SA5为反转,重复第(2)项。 主轴运转实验记录表:在M1转向栏打“√”
3.纵向进给实验 观察:若M1未运转(KM1未通电),扳动纵向手柄,电机M2是否运转。 使M1正常运转(正转或反转),扳动纵向手柄,观察并记录进给电机M2的运转情况及相应接触器KM2、KM3的动作情况。 纵向进给实验记录表:
4.横向及升降进给实验 一字手柄扳向中间(零位),使M1正常运转。扳动十字手柄,观察并记录电机M2的运转情况及相应接触器KM2,KM3的动作情况。 横向及升降进给实验记录表:
实际铣床是怎样区分向前与向下,向上与向后的? 5.六个进给方向的互锁实验 将一字手柄放在非零位(向右或向左),使M2运转,扳动十字手柄向上、下、左、右,M2发生什么现象? 反之,将十字手柄放在非零位,使一字手柄向右或向左,M2发生什么现象? 解释上述实验现象。 四. 实验报告 整理观察记录结果,分析铣床电气控制特点。
图1-1 X62W万能升降台铣床电气控制原理
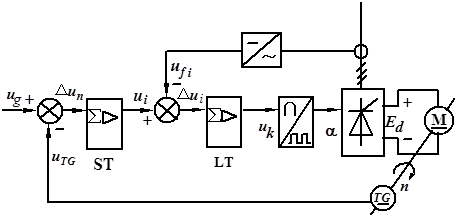
实验二 直流调速实验 一.实验原理 双闭环晶闸管不可逆直流调速系统原理框图如图2-1
图2-1 转速、电流双闭环直流电机调速系统框图
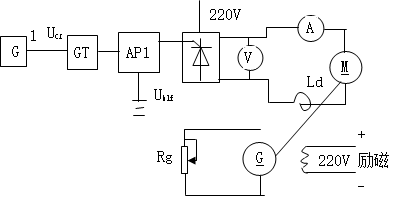
转速负反馈构成外环(大环),调节速度,称为速度调节器,其作用是稳定转速。电流负反馈构成内环(小环),调节电流,称为电流调节器,其作用是稳定电流。速度调节器和电流调节器都是PI调节器,速度调节器的输出作为电流调节器的给定。 当加上给定电压时,速度调节器饱和输出,电流调节器获得最大给定,使电动机以限定的最大启动电流加速启动,直到电机转速达到给定转速。此时给定电压与速度反馈电压相等,速度调节器继续以饱和值输出。电机转速调过额定值,速度调节器反向积分,输出减小,电机转速回落,稳定在给定值。 二.实验设备 (1).主控制屏EC01; (2).直流电动机----直流发电机----测速发电机组; (3).挂箱EC02:电流反馈与过流保护(FBC+FA),给定器(G), 零速封锁器(DZS); (4).挂箱EC03:速度变换器(FBS),速度调节器(ASR), 电流调节器(ACR); (5).WC4603通用慢扫描示波器。 三.实验内容 1.开环调速系统电机械特性测试; 2.单闭环(速度或电流)调速系统电机机械特性测试; 3.双闭环调速系统电机机械特性测试。 四.实验方法 1.开环调速系统电机机械特性 (1).将直流电动机作为Ⅰ桥的负载;直流发电机以滑线变阻 器作负载;测速发电机输出接转速表,按图2-2接线。
图2-2 开环调速系统
(2).逐渐加大Ug,使电机起动,升速。调节Ug和滑线变阻 器RG,使电动机电流Id=Ied(1.16A);转速n=ned(1600r/min),保持不变。 (3).改变负载电阻Rg,测出给定不变时直流电机的开环机 械特性n=f(Id),记录于下表中;
(4).使电动机工作在额定状态,改变负载电阻Rg ,同时保 持Ud不变(通过调节Ug来实现)。测出其开环机械特性n=f(Id); 记录下表中:
2.速度反馈单闭环控制的直流电动机机械特性的测试 (1).按图2-3接线 图2-3 转速负反馈单闭环调速系统 图中:TG为测速发电机; FBS为速度变换电路; ASR为速度调节器; G为给定电路; DES为零速封锁器; (2).调节Ug,使电动机工作在额定状态,并保持Ug不变。 改变Rg,测出速度单闭环时直流电动机的机械特性,并记录于下表:
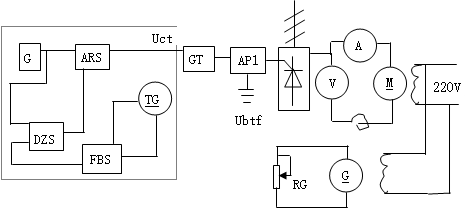
3.速度,电流双闭环控制的直流电动机机械特性 (1).接线图如2-4
图2-4 速度,电流双闭环调速系统
(2).同上,使电动机工作在额定状态,并保持Ug不变,改 变Rg,测出双闭环控制时直流电动机的机械特性n=f(Id),并记录于下表中:
注意:各次实验,使Id变化相同,以便于比较。 五.实验报告 作出开环、速度单闭环、双闭环控制时直流电动机的机械特性 图,并分析闭环控制能提高机械特性硬度的原因。
实验三 SPWM与矢量控制变频调速系统实验 一. 实验目的 1.理解微机控制脉冲宽度调制(PWM)变频调速系统的组成及基本工作原理。 2.了解正弦波脉宽调制(SPWM)控制与电压空间矢量控制的基本原理、特点及不同调制方式对系统性能的影响。 二. 实验系统组成及工作原理 系统采用交——直——交电压型变频器。三相工频电源经三相不控桥式(二极管构成)整流后获得直流电压,输给智能功率模块IPM,模块IPM输出频率可调的三相交流电源拖动异步电动机,实现异步电动机变频调速。 IPM模块的核心是IGBT(绝缘栅双极性晶体管)——驱动电路——智能化检测三大部分。该模块包含由6只IGBT和6只续流二极管构成的三相逆变器。驱动电路为栅极驱动。在智能化检测部分包括了逻辑控制电路、欠压、过流、短路、过热等保护电路。 模块的主电路共有5个接线端子:两个直流端子+ -,三个交流输出端子U、V、W。控制部分共有15个端子,包括PWM输入,故障信号及驱动电源输入等。其内部分等效示意图见图4-1。 控制系统由Intel 80C196MC专用单片机系统、信号检测电路、驱动与保护电路等组成。 80C196MC是专门为电机控制所设计的一种16位微控制器(MCU)。它由一个CI196核心、一个三相波形发生器WFG和若干个其它片内功能块构成。其它功能块包括A/D转换器,一个事件处理门阵列(EPA),两个定时器和一个脉冲调制单元。80C196MC的波形发生器WFG是其独具的特点,大大简化了用于产生脉宽调制波形的控制软件和外部硬件,特别适于三相交流异步电动机的变频调速。波形发生器WFG可以产生3组可独立编程的PWM信号,它们有共同的载波频率、无信号时间和操作方式。一旦启动之后,WFG只要求CPU在改变PWM的占空比时加以干预。 80C196MC还具备以前的微控制器所不具备的三种特殊工作方式:空闲方式、停机方式和电路传真方式。这些方式可以通过软件来设置。CPU的这一特点大大降低了芯片功耗,提高了芯片寿命。
图3-1 智能化IGBT功率模块的等效电路
实验系统可用软件实现正弦波脉宽调制(SPWM)控制和电压空间矢量控制(磁链跟踪控制)。 三. 实验设备和仪器 1.EC01主控屏; 2.EM—14变频调速组件; 3.异步电动机——直流发电机组:其额定参数如下, 鼠笼式异步电动机:100W,220V(△),0.48A,1420r/min。 直流发电机:185W,220V,1.16A,1600r/min。 4.滑线变阻器; 5.慢扫描示波器; 6.双踪示波器. 四. 实验内容及步骤 (一).实验线路:使用EC01及EM14挂箱。
交、直流电压、电流表在EC01主控屏上。 (二).观察性实验:观察SPWM及电压空间矢量控制调速工作的基本情况。 将RG电阻调到最大,EM—14上的给定电位器左旋到底,起动主电路按纽,主电路电源指示灯亮。 1.按下SPWM按纽,使系统工作在SPWM控制状态。 (1).按下同步调制按纽,同步调制指示灯亮,系统工作在同步调制状态。逐渐增大给定,确认系统工作正常,再逐渐加大给定,直至频率达50HZ; (2).按下异步调制按纽,逐渐加在给定,直至50HZ; (3).按下混合调制按纽,逐渐加大给定,直至50HZ; 观察电机运行随频率变化的情况。 2.按下电压空间矢量控制按纽,使系统工作在电压空间矢量 控制工作状态。 (1),(2),(3),同SPWM工作状态的实验方法,观察三种 调制方式下系统的工作情况。 (三).电动机机械特性的测定 1.在SPWM和空间矢量状态下,调节给定使频率达到50HZ。 保持给定不变,调节RG,逐渐加大负载,直到异步电动机或直流发电机达到额定负载(直流)为止。作下列记录。 (1).SPWM控制的电动机机械特性: 频率50HZ
(2).空间矢量控制电动机机械特性: 频率50HZ
2.同1.测试低速时电机的机械特性。调节给定使频率为5HZ,保持给定不变,重复上述实验,记录数据于下表。
(1).SPWM控制的电机机械特性: 频率5HZ
(2).空间矢量控制的电机机械特性: 频率5HZ
五. 实验报告 1.整理数据,作出所做实验情况下电机机械特性曲线 n= f ( i ) 。 2.计算5HZ时电机的静差率 3.定性评价SPWM和空间矢量控制的性能。
实验四 PLC实验 一. 实验目的 1. 掌握PLC的结构组成及基本工作原理。 2. 掌握PLC的基本编程方法及基本指令的使用。 二. 实验原理 可编程控制器是微机技术和继电器常规控制相结合的产物,是在顺序控制器和微机控制器的基础上发展起来的新型控制器,是一种以微处理器为核心的用作数字控制的特殊计算机,因此它的硬件配置与一般微机装置类似。PLC主要由中央处理器、存储器、输入接口电路、输出接口电路、电源和编程器等组成。PLC可编程控制器是以顺序执行存储在它的存储器中的程序来完成其控制功能的。根据生产工艺要求编制出来的控制程序通过一定方式输入到PLC中,并经过调试修改后成为可执行的控制程序。 1.编程器 将程序输入到PLC中有二种方法:一种是通过编程器,另一种是通过计算机。编程器一般包括显示部分键盘部分。(本实验采用FX-10P-E编程器),用以写入、读出、删除和插入程序。 2.可编程控制器 本实验采用三菱FX系列PLC是小型机,输入/输出点数可从10点~256点(本实验为FX2N—48MR,输入/输出各为24点),输入/输出地址编号以八进制表示,其中输入端编号从X000、X001、…开始,输出从Y000、Y001、…编号开始。输入接口电路有直流方式或交流方式;输出接口电路有继电器方式,晶体管方式和可控硅方式。 三. 实验设备 1.PLC85001型可编程序控制器实验台。 2.FX-10P-E编程器。 3.演示模板、编程电缆、连接导线若干。 四.实验内容 4.编程器的指令输入、删除、插入、程序的读出等操作; 5.常用基本指令的使用方法; 6.对指定模块进行编程并验证其实验结果。 五.实验方法 1.编程器的使用方法 ⑴.关电源,将手持编程器FX-10P-E通过连接电缆接至PLC主机的编程器插座中,并将主机的工作方式选择(STOP/RUN)拔至“STOP”位置。 ⑵.接通PLC实验台的电源,PLC主机通电,“power”灯亮(24V/3A直流稳压电源也已通电,开关打到“ON”有输出 )。 ⑶.写入程序前,需对PLC“RAM”全部清零,按以下操作进行 RD/WR → NOP → A → GO → GO ⑷.程序的输入首先要按功能编辑键,键盘的分别有 RD/RW 、INS/DEL 、和 MNT/TEST 等字符分别代表读/写、插入/删除和监控/测试功能。 其功能为后者有优先权。 2.编程操作 ⑴.输入下列程序进行编程器操作训练,梯形图及指令表如下:
⑵.输入完程序,按下列操作键,即可读出程序进行检查; RD → STEP → 0 → GO → ↓ ⑶.执行程序 a . 关电源,按下图接线,验证输入程序的正确性。
b.接线检查无误后,接通电源,将PLV的“RUN/STOP”开关切换到“RUN”位置,按下表操作模拟输入开关,观察输出结果正确否,如果操作结果不是表上的结果,说明程序输入有错误或者接线有误。
六.实验报告 说明PLC的组成及工作原理,编程器的使用及程序调试过程。 根据设计的梯形图,写出其语句指令,并根据不同的输入写出其输出结果。
附:舞台艺术灯饰的PLC控制实验
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||